Smart-Fault-Detector
Project Description
The Smart-Fault-Detector is a specialized diagnostic device engineered to detect actuator faults and failures in high-stakes systems like rockets and robotics. By monitoring the “pulse” of an actuator through electrical and mechanical sensors, it identifies anomalies before they lead to catastrophic system failure.
Hardware Architecture
The system is built around the GLYPH-C3 (ESP32-C3) microcontroller. The architecture is divided into modular blocks for power management, sensing, and user interface.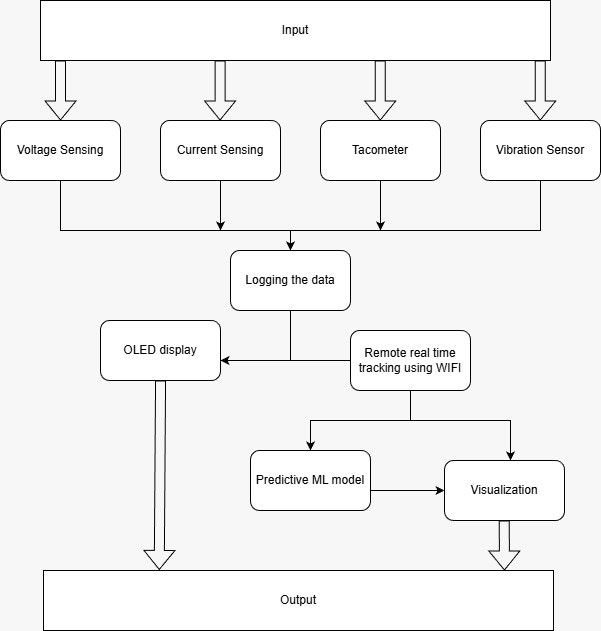
Sensing Implementation
| Feature | Implementation | Purpose |
|---|---|---|
| Voltage | Opto-isolated (PC817) Divider | Safely measures high-voltage rails up to 12V with optical isolation. |
| Current | Copper Trace Shunt | Cost-effective and efficient current measurement via voltage drop. |
| RPM | IR Sensor | Non-contact measurement of rotational speed. |
| Vibration | Piezoelectric Sensor | Monitors mechanical impacts and high-frequency wear. |
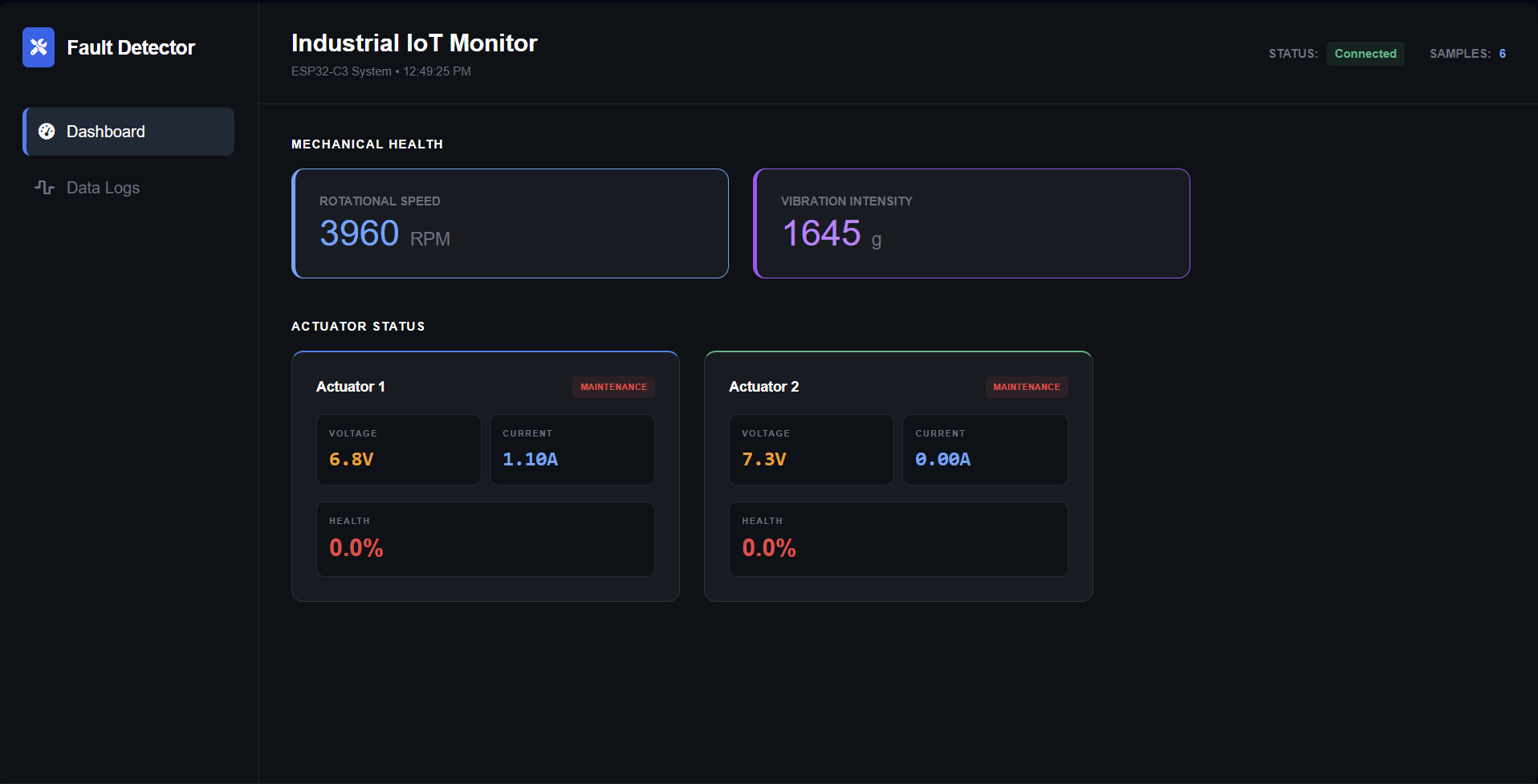
Web Dashboard & Data Logging
The Smart-Fault-Detector ensures data is never lost, whether you are monitoring it live or analyzing it after a flight. Preview- Logging: MicroSD card module for real-time data logging and post-failure forensics.
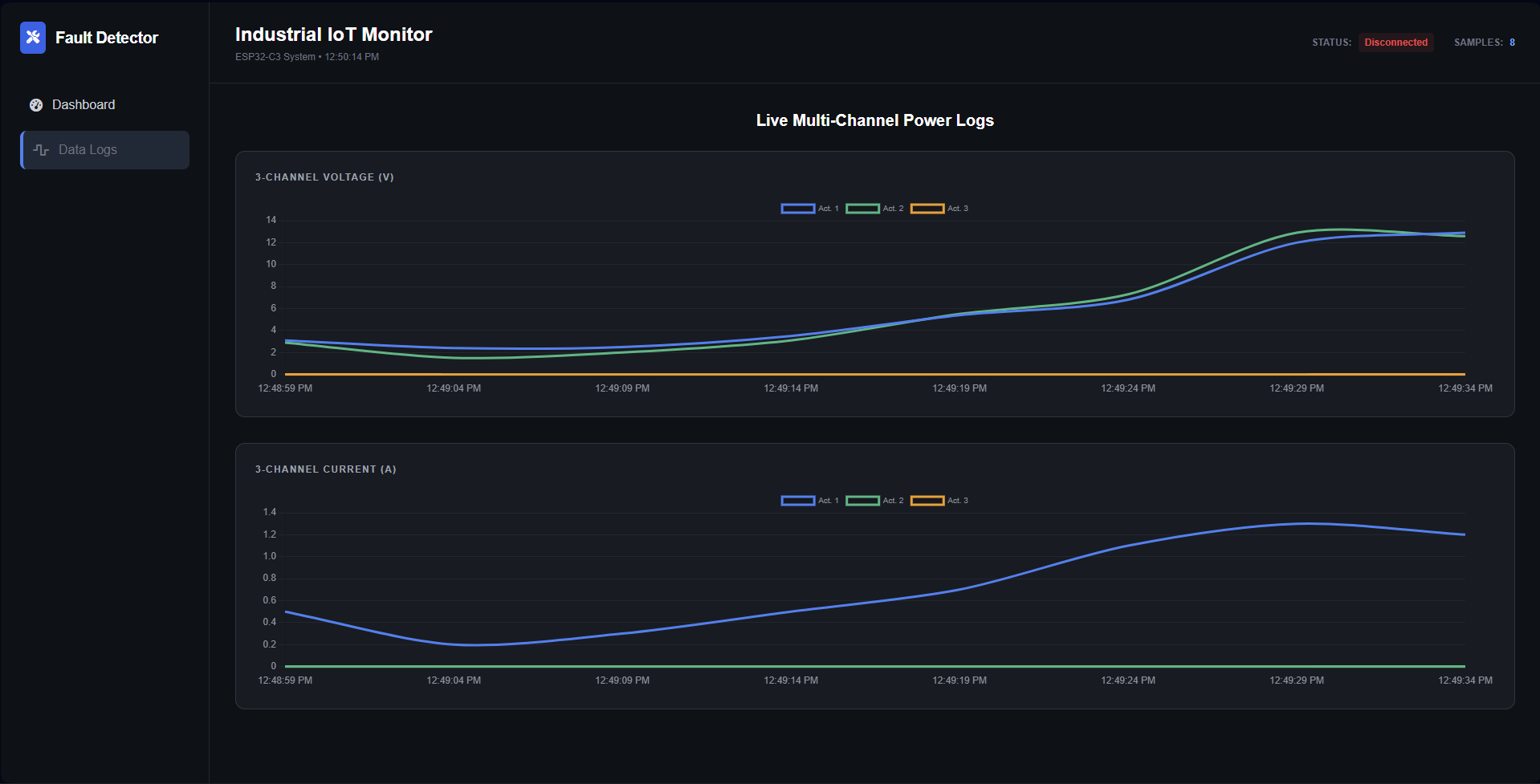
- IoT Dashboard: A mobile-responsive web server hosted on the ESP32-C3 featuring:
- Live Graphs: Real-time telemetry for Voltage and Current.
- Wear & Tear Tracking: Predictive analysis based on vibration patterns.
Technical Specifications
- Microcontroller: ESP32-C3 (RISC-V).
- Nominal Input: 12V DC.
- Nominal Curernt Draw: 2A.
Team Robomanipal
- Project Created At: Hardware Hackathon 2.0 , Bangalore
- Developers: Adwait, Vikram, Prahadeesh
- Release Date: December 2025
© 2025 Team 3 Hardware Hackathon 2.0. All Rights Reserved.